Движение, при котором траектории точек твердого тела представляют собой окружности различных радиусов с центрами, лежащими на одной прямой, называется вращательным движением. Причины движения, в том числе вращательного, изучает динамика. Рассмотрим основное уравнение динамики вращательного движения твердого тела.
Моменты силы и инерции
Общий принцип основного уравнения динамики для вращательного движения сохраняется. То есть, изменение скорости движения (ускорение) прямо пропорционально интенсивности воздействия, и обратно пропорционально инертности тела.
Но, особенность вращательного движения состоит в том, что одна и та же сила может сообщать точке различные угловые ускорения, в зависимости от точки ее приложения.
Это легко наблюдать на примере действия рычага, когда поднимается тяжелый предмет. Чем длиннее плечо приложения силы рычага, тем меньше требуется сила для подъема предмета, хотя масса предмета остается неизменной.
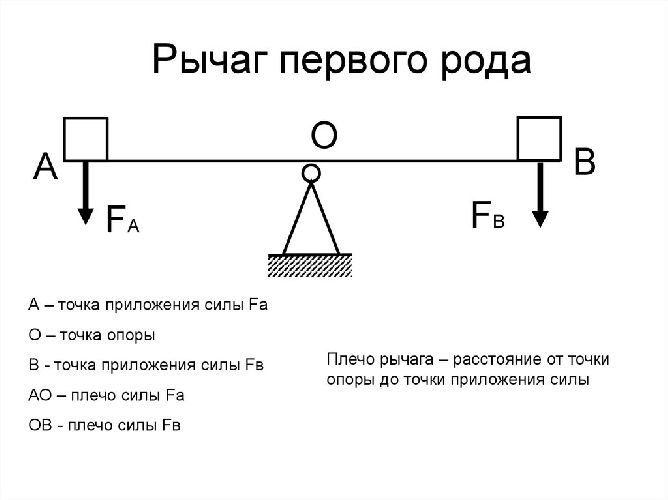
Таким образом, для вращательного движения обязательно необходимо учитывать плечо – расстояние от точки приложения силы до оси вращения. Для такого учета в уравнении сила и масса заменяется моментом силы и моментом инерции соответственно. Момент силы $M$ равен произведению модуля силы $F$ на плечо силы $l_F$ (расстояние от точки приложения до оси вращения). Момент инерции $J$ равен произведению массы материальной точки $m$ на квадрат расстояния от нее до оси вращения $l_F$.
Второй Закон Ньютона для вращения
Заменяя силу и массу во Втором Законе Ньютона на моменты силы и инерции, необходимо помнить, что ускорение, получаемое в такой формуле получается не линейным, а угловым $varepsilon$. Оно равно изменению угловой скорости $omega$ за единицу времени и измеряется в радианах в секунду за секунду. Скорость $omega$, приобретаемая телом в результате этого ускорения, также является угловой и измеряется в радианах в секунду:
$$varepsilon = {M over J}={F l_F over ml_m^2}$$
где:
- $varepsilon$ – угловое ускорение, получаемое телом;
- $М$ – момент силы, приложенной к телу;
- $J$ – момент инерции тела;
- $F$ – величина силы, приложенной к телу;
- $l_F$ – плечо силы, приложенной к телу;
- $m$ – масса тела;
- $l_m$ – расстояние от оси вращения до центра масс тела.
Отметим, что в данной формуле момент инерции рассчитывается для материальной точки, то есть, для случая, когда ось вращения лежит вне тела, а размерами тела можно пренебречь по сравнению с величиной плеча. Если ось вращения проходит через само тело или размеры тела сравнимы с величиной плеча, расчет момента инерции гораздо более сложен.

Что мы узнали?
Уравнение динамики вращательного движения похоже на уравнение динамики поступательного движения. Но вместо силы и массы здесь используются момент силы и момент инерции. А получаемое ускорение является угловым, и измеряется в радианах в секунду за секунду.