Основная задача кинематики — описание движения безотносительно причин этого движения. Для такого описания нужно задаться способом, которых существует несколько. Кратко рассмотрим координатный способ описания движения точки.
До середины XX в. в качестве эталонного процесса принималось вращение Земли вокруг своей оси, а как единица времени принималась $1/86400$ часть среднесуточного периода — секунда.
Для связи моментов времени и положения в пространстве проще всего использовать таблицу «момент времени — положение в пространстве». Однако табличный метод задания связи описывает только некоторые моменты движения и далеко не всегда удобен. Поэтому наиболее широко используется функциональный способ задания связи: когда выводится математическая формула, связывающая момент времени и положение в пространстве.
Наконец, третьей частью описания движения является способ задания положения в пространстве. Рассмотрим суть координатного способа.
Система координат
Поскольку положение в пространстве может быть задано только относительно других тел, то необходимо принять некоторое тело за базовое (оно называется телом отсчета), и точку этого тела принять за начальную точку системы координат.
От начальной точки откладываются координатные оси. В физике координатные оси не отличаются от геометрических координатных осей, но их число может быть различным (от одной до трех), в зависимости от ситуации в задаче.
Координатный способ описания
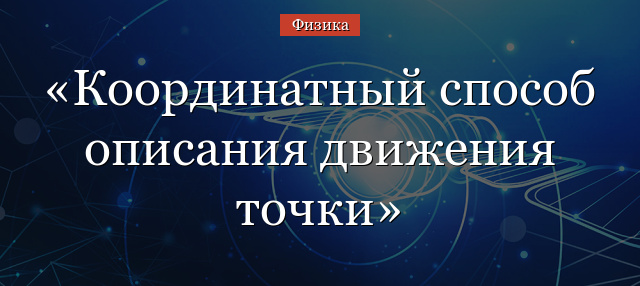
Задавшись системой координат, можно описывать положение точки в пространстве. Порядок описания ничем не отличается от геометрического. Из точки на оси координат опускаются перпендикуляры, и место пересечения отмечается как соответствующая координата.
Возможно и обратное действие: по координатам можно восстановить положение точки. Если ось одна, то точка непосредственно находится на оси в указанной координате. Если оси две, то на осях в указанных координатах проводятся перпендикуляры, точка находится на их пересечении. Если осей три, то в указанных координатах строятся плоскости, перпендикулярные осям. Точка пересечения всех трех плоскостей и есть положение в пространстве искомой точки.
Как уже говорилось выше, для связи координат с моментами времени наиболее удобно использовать математические функции. Задав функции каждой координаты, мы однозначно определяем движение точки в виде:
$$begin{cases}x=x(t)\y=y(t)\z=z(t) end{cases}$$
Такие уравнения называются координатной формой кинематических уравнений движения точки.
Примером координатного способа описания движения точки могут служить уравнения:
$$begin{cases}x=2t\y=2t\z=2t end{cases}$$
В данном случае точка движется по прямой, начав движение в нулевой момент времени из начала координат и находясь всегда на равном расстоянии от всех трех осей координат.
Для более сложных траекторий движения уравнения будут сложнее.
Что мы узнали?
Координатный способ описания движения точки заключается в том, чтобы описывать положение точки с помощью координатных осей. Если при этом заданы математические уравнения, которые связывают момент времени с координатами, то, подставляя в эти уравнения момент времени, можно получать положение точки в этот момент.