Энергия — это фундаментальная физическая величина означающая возможности тела производить работу; чем больший запас энергии имеет тело, тем большую работу оно сможет совершить. Различают разные виды энергии: потенциальную, кинетическую, внутреннею, электромагнитную, ядерную. Рассмотрим здесь определения и примеры кинетической и потенциальной энергий; часто эти два вида энергий объединяют общим понятием механической энергии.
$s = {{v_2^2-v_1^2}over {2*a}}$ (3).
Отсюда следует выражение для работы:
$A=F*s=m*a*{{v_2^2 – v_1^2}over 2*a}={m*v_2^2over 2}-{m*v_1^2over 2}$ (4).
Физическая величина, равная половине произведения массы тела m на квадрат его скорости, называется кинетической энергией тела Ek. Слово “кинетическая” имеет латинское происхождение (“кинема” — движение).
$E_k = {m*v^2over 2}$ (5).
Тогда для работы A получим следующую формулу:
$A = E_{k2} – E_{k1}$ (6).
Таким образом, работа силы, приложенной к телу, равна изменению кинетической энергии тела. Поэтому любое движущееся тело обладает кинетической энергией.
Что такое потенциальная энергия
Потенциальная энергия — это энергия, которая основывается на взаимном расположении взаимодействующих тел (или частей одного тела). Слово “потенциальная” имеет латинское происхождение (“potentialis” — мощный, могущий). Одно тело, не взаимодействующее с другими телами, не может обладать потенциальной энергией. Потенциальная энергия — это энергия взаимодействия тел. Разберем два основных примера по теме потенциальной энергии: энергия тела, на которое воздействует сила земного притяжения и энергия упруго деформированного тела.
Сила тяжести — источник потенциальной энергии
По аналогии с кинетической энергией определим работу A, совершенную силой тяжести FТ по перемещению тела массой m с высоты h1 от поверхности Земли до высоты h2. При этом h1 > h2, то есть тело переместилось сверху вниз. Считаем силу тяжести постоянной, независящей от высоты и равной m*g, где g = 9,8 м/с2 — ускорение свободного падения. Тогда, воспользовавшись формулой (1), получим:
$A = m*g*(h_1 – h_2)$ (7)
Таким образом, работа силы тяжести по переходу тела с высоты h1 на высоту h2 от поверхности Земли равна изменению величины m*g*h, которая и называется потенциальной энергией тела Ep:
$Ep = {m*g*h}$ (8)
Величина работы есть ничто иное, как изменение энергии тела, в данном случае потенциальной:
$A = E_{p1} – E_{p2}$ (9).
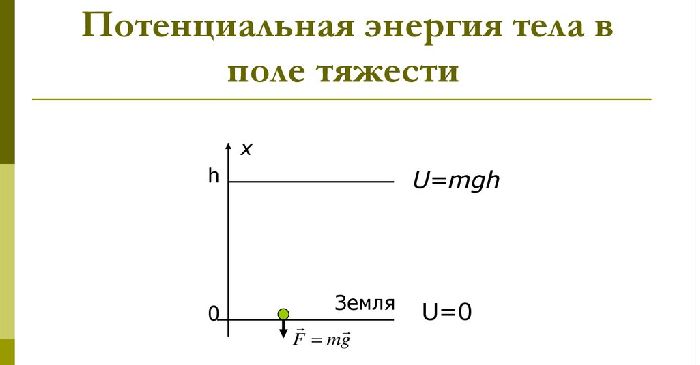
Если за нулевой уровень (точку отсчета) взята поверхность Земли, то на глубине h тело будет обладать отрицательной потенциальной энергией:
$Ep = – {m*g*h}$
Упругие деформации — источник энергии
Если к пружине с жесткостью k на горизонтальной поверхности присоединить грузик, вытянуть пружину, а затем отпустить грузик, то под действием силы упругости пружины грузик придет в движение и сдвинется на определенное расстояние. Попробуем снова вычислить работу, которую совершит сила упругости при удлинении пружины от начального положения x1 до конечного х2.
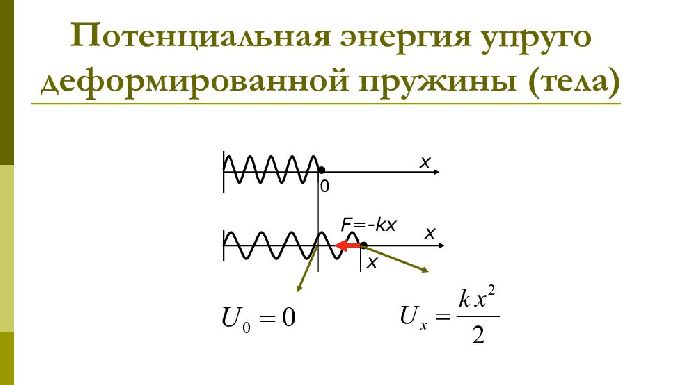
Сила упругости будет изменяться в зависимости от размера деформации. Работа, произведенная силой упругости Fу при смещении пружины из точки x1 в точку x2, будет равна:
$A = F_у (x_1 – x_2)$ (10).
Сила упругости по закону Гука прямо пропорциональна деформации пружины, и среднее ее значение равно:
$F_{уср} = k*{ (x_1 + x_2)over 2}$ (11).
Подставив в (10) вместо Fу значение из уравнения (11), получаем:
$A = k*{ (x_1 + x_2)over 2} *(x_1 – x_2)= {k *( x_1^2 – x_2^2)over 2}$ (12).
Уравнение (12) можно представить в несколько другом виде:
$A = {k*x_1^2over 2} – { k*x_2^2over 2}$ (13).
Из уравнения (13) видно, что работа равна разности величины потенциальной энергии Ep в точках х1 и х2:
$Ep = {k*x^2over 2}$ (14),
Из уравнений (13) и (14) следует, что работа силы упругости равна изменению потенциальной энергии пружины. Если в конечной точке х2=0, т.е. пружина не деформирована, то:
$Ep = A$ (15).
Значит потенциальная энергия деформированного тела равна работе, совершенной силой упругости при переходе тела в состояние с нулевой деформацией.
Причина возникновения сил упругости кроется во взаимодействии атомов и молекул тела. При сжимании возникают силы отталкивания между атомами, а при растяжении — силы притяжения, которые стремятся восстановить начальные размеры. Атомы и молекулы в своем составе имеют электроны и протоны — частицы с электрическими зарядами. В результате деформаций изменяются взаимные положения атомов и молекул. Электрические силы стремятся вернуть атомы в начальное положение. Так возникает сила упругости.
Модули упругости различных тел рассчитываются с помощью специальных математических моделей на основании экспериментальных данных. Значения модулей упругости для различных материалов приведены в справочных таблицах.
Что мы узнали?
Итак, мы узнали, что такое кинетическая и потенциальная энергии. С помощью базовых определений выведены формулы кинетической и потенциальной энергии (5), (8) и (14). Потенциальной энергией не может обладать одно тело — это энергия взаимодействия тел. Кинетической энергией обладает любое движущееся тело.